
作为一名Python开发者,你是否曾经为编写繁琐的SQL语句而苦恼?是否在处理数据库连接、事务管理时感到头疼?SQLAlchemy作为Python生态中最强大的ORM框架,能够帮你彻底摆脱这些困扰。
本文将通过一个完整的用户管理系统实战案例,详细讲解如何在Windows环境下使用SQLAlchemy操作MySQL数据库。从环境搭建到高级应用,从基础CRUD到复杂查询,让你快速掌握SQLAlchemy的核心技能,提升Python开发效率。
无论你是初学者还是有经验的开发者,这篇文章都将为你的上位机开发和数据库操作提供实用的解决方案。
🔍 问题分析
在实际的Python开发中,我们经常遇到以下数据库操作难题:
传统方式的痛点:
- 手写SQL语句容易出错,维护困难
- 数据库连接管理复杂,容易出现连接泄露
- 不同数据库之间的SQL语法差异导致移植困难
- 数据类型转换和验证需要大量重复代码
SQLAlchemy的优势:
- 对象关系映射(ORM):将数据库表映射为Python类
- 数据库无关性:支持多种数据库,代码易于迁移
- 连接池管理:自动管理数据库连接,提高性能
- 强大的查询语法:提供直观的Python式查询方式
💡 解决方案
🛠️ 环境准备
首先,我们需要安装必要的依赖包:
Bashpip install sqlalchemy pip install pymysql pip install cryptography
🏗️ 项目结构搭建
创建一个清晰的项目结构:
Pythonsqlalchemy_demo/
├── config.py # 数据库配置
├── models.py # 数据模型定义
├── database.py # 数据库连接管理
├── operations.py # 数据库操作
└── main.py # 主程序入口
昨天有同事向我咨询了这个问题,我发现了一种新的方法来处理字符串的聚合与分割,你是否为了分割一个包含多个值的字符串字段而不得不编写复杂的循环代码?
作为数据库开发者,我们经常遇到这样的场景:
- 需要将员工的多个技能合并显示:
"Java,Python,SQL" - 要将订单的多个商品ID拆分成单独的记录进行处理
- 统计报表中需要动态拼接查询条件
如果你还在使用传统的游标循环或复杂的XML PATH方法,那你就OUT了!SQL Server为我们提供了两个强大的内置函数:STRING_AGG 和 STRING_SPLIT,它们能让这些操作变得异常简单和高效。
本文将通过实战案例,带你掌握这两个函数的精髓,让你的SQL代码更加优雅和高效!
🔥 STRING_AGG:多行变一行的艺术
💡 问题分析:传统聚合的痛点
在SQL Server 2017之前,我们要实现多行数据的字符串聚合,通常需要这样写:
SQL-- 老式写法:复杂且难理解
SELECT STUFF((
SELECT ',' + skill_name
FROM employee_skills e2
WHERE e2.employee_id = e1.employee_id
FOR XML PATH('')
), 1, 1, '') AS skills
FROM employees e1;
这种写法不仅代码冗长,性能也不够理想,这个写法在以前基本这第干了。
⚡ STRING_AGG:优雅的解决方案
基础语法:
SQLSTRING_AGG(expression, separator) [WITHIN GROUP (ORDER BY order_expression)]
🛠️ 实战案例1:员工技能聚合
SQL-- 创建测试数据
CREATE TABLE #employees (
employee_id INT,
employee_name NVARCHAR(50)
);
CREATE TABLE #employee_skills (
employee_id INT,
skill_name NVARCHAR(50),
skill_level INT
);
INSERT INTO #employees VALUES
(1, '张三'), (2, '李四'), (3, '王五');
INSERT INTO #employee_skills VALUES
(1, 'Java', 5), (1, 'Python', 4), (1, 'SQL', 5),
(2, 'C#', 4), (2, 'JavaScript', 3),
(3, 'Python', 5), (3, 'React', 4), (3, 'Node.js', 3);
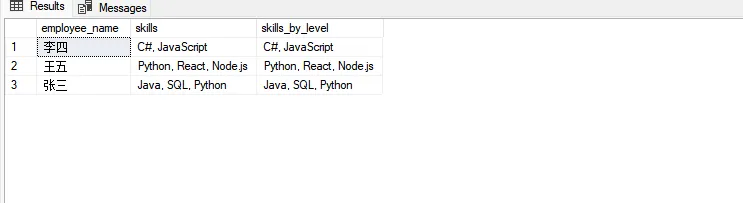
SQLSELECT
e.employee_name,
STRING_AGG(s.skill_name, ', ') AS skills,
STRING_AGG(s.skill_name, ', ') WITHIN GROUP (ORDER BY s.skill_level DESC) AS skills_by_level
FROM #employees e
LEFT JOIN #employee_skills s ON e.employee_id = s.employee_id
GROUP BY e.employee_id, e.employee_name;
在Python GUI开发中,用户交互是核心环节。你是否遇到过这样的困扰:需要让用户进行多项选择时不知道用什么组件?或者想实现单选功能却不知道如何让多个选项互斥?今天我们就来深入探讨Tkinter中两个重要的交互组件——Checkbutton(勾选框)和Radiobutton(单选框)。
本文将从实际应用场景出发,通过详细的代码示例和最佳实践,帮你完全掌握这两个组件的使用方法。无论你是Python初学者还是有一定经验的开发者,都能从中获得实用的开发技巧,让你的GUI应用更加专业和用户友好。
🔍 问题分析
应用场景对比
在实际项目开发中,我们经常需要处理两类选择问题:
多选场景(Checkbutton):
- 软件设置界面的功能开关
- 文件处理工具的选项配置
- 数据分析工具的筛选条件
单选场景(Radiobutton):
- 性别选择、级别选择
- 操作模式切换(如:手动/自动)
- 文件格式选择(如:CSV/Excel/JSON)
选择合适的组件不仅关乎用户体验,更影响程序的逻辑设计和数据处理方式。
💡 解决方案
🎯 核心设计思路
- 状态管理:使用
IntVar()或BooleanVar()管理组件状态 - 事件绑定:通过
command参数实现实时响应 - 数据收集:设计统一的数据获取和处理机制
🚀 代码实战
📋 Checkbutton(勾选框)实现
基础用法示例
Pythonimport tkinter as tk
from tkinter import ttk
class CheckboxDemo:
def __init__(self, root):
self.root = root
self.root.title("勾选框演示程序")
self.root.geometry("400x300")
# 创建变量存储勾选状态
self.var1 = tk.BooleanVar()
self.var2 = tk.BooleanVar()
self.var3 = tk.BooleanVar()
self.create_widgets()
def create_widgets(self):
# 主标题
title = tk.Label(self.root, text="请选择你喜欢的编程语言:",
font=("微软雅黑", 14, "bold"))
title.pack(pady=20)
# 创建勾选框
cb1 = tk.Checkbutton(self.root, text="Python",
variable=self.var1,
command=self.on_check_change,
font=("微软雅黑", 12))
cb1.pack(anchor='w', padx=50, pady=5)
cb2 = tk.Checkbutton(self.root, text="Java",
variable=self.var2,
command=self.on_check_change,
font=("微软雅黑", 12))
cb2.pack(anchor='w', padx=50, pady=5)
cb3 = tk.Checkbutton(self.root, text="C++",
variable=self.var3,
command=self.on_check_change,
font=("微软雅黑", 12))
cb3.pack(anchor='w', padx=50, pady=5)
# 结果显示区域
self.result_label = tk.Label(self.root, text="当前选择:无",
font=("微软雅黑", 11),
fg="blue")
self.result_label.pack(pady=20)
# 操作按钮
btn_frame = tk.Frame(self.root)
btn_frame.pack(pady=20)
tk.Button(btn_frame, text="全选",
command=self.select_all,
width=8).pack(side='left', padx=5)
tk.Button(btn_frame, text="全不选",
command=self.deselect_all,
width=8).pack(side='left', padx=5)
tk.Button(btn_frame, text="获取结果",
command=self.get_result,
width=8).pack(side='left', padx=5)
def on_check_change(self):
"""勾选状态变化时的回调函数"""
selected = []
if self.var1.get(): selected.append("Python")
if self.var2.get(): selected.append("Java")
if self.var3.get(): selected.append("C++")
if selected:
self.result_label.config(text=f"当前选择:{', '.join(selected)}")
else:
self.result_label.config(text="当前选择:无")
def select_all(self):
"""全选功能"""
self.var1.set(True)
self.var2.set(True)
self.var3.set(True)
self.on_check_change()
def deselect_all(self):
"""全不选功能"""
self.var1.set(False)
self.var2.set(False)
self.var3.set(False)
self.on_check_change()
def get_result(self):
"""获取最终结果"""
result = {
'Python': self.var1.get(),
'Java': self.var2.get(),
'C++': self.var3.get()
}
selected = [lang for lang, checked in result.items() if checked]
if selected:
tk.messagebox.showinfo("选择结果",
f"你选择了:{', '.join(selected)}")
else:
tk.messagebox.showwarning("提示", "请至少选择一项!")
if __name__ == "__main__":
root = tk.Tk()
app = CheckboxDemo(root)
root.mainloop()

在Python GUI开发中,当界面内容超出窗口显示范围时,如何优雅地处理?这是每个Python开发者都会遇到的实际问题。无论是显示大量数据的表格、长篇文本内容,还是复杂的控件布局,滚动条Scrollbar都是不可或缺的解决方案。
本文将深入解析Tkinter中Scrollbar的实现原理和最佳实践,从基础概念到高级应用,带你掌握这一重要的界面组件。通过实际代码示例和项目应用,让你能够轻松在自己的Python项目中实现专业级的滚动效果。
🔍 问题分析:为什么需要滚动条
界面空间限制的挑战
在实际的Python开发项目中,我们经常遇到以下场景:
- 数据展示需求:需要显示成百上千行的数据记录
- 文本内容过长:帮助文档、日志信息等长文本显示
- 控件数量众多:复杂表单或设置界面包含大量控件
- 图像内容超大:需要查看高分辨率图片的细节
这些情况下,如果没有滚动条,用户体验将大打折扣,甚至无法正常使用应用程序。
Tkinter滚动条的优势
Tkinter的Scrollbar组件具有以下特点:
- 原生支持:无需额外安装第三方库
- 高度可定制:支持水平、垂直方向,可调整外观
- 性能优秀:即使处理大量数据也能保持流畅
- 兼容性强:与Tkinter其他组件完美集成
💡 解决方案:Scrollbar核心概念
基础工作原理
Scrollbar本质上是一个视图控制器,它通过以下机制实现滚动:
- 视图窗口(View):用户看到的显示区域
- 内容容器(Content):实际的完整内容
- 滚动控制:Scrollbar提供的位置控制接口
关键方法解析
Python# 核心方法说明
scrollbar.config(command=widget.yview) # 绑定滚动事件
widget.config(yscrollcommand=scrollbar.set) # 同步滚动状态
🚀 代码实战:从入门到精通
📌 基础实现:文本框滚动条
让我们从最简单的文本滚动开始:
Pythonimport tkinter as tk
from tkinter import ttk
class BasicScrollExample:
def __init__(self):
self.root = tk.Tk()
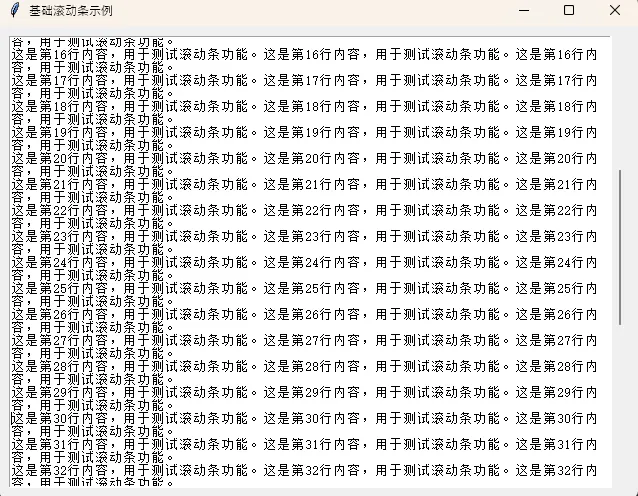
self.root.title("基础滚动条示例")
self.root.geometry("500x400")
self.setup_ui()
def setup_ui(self):
# 创建主框架
main_frame = ttk.Frame(self.root)
main_frame.pack(fill=tk.BOTH, expand=True, padx=10, pady=10)
# 创建文本框和滚动条
self.text_widget = tk.Text(main_frame, wrap=tk.WORD)
scrollbar = ttk.Scrollbar(main_frame, orient=tk.VERTICAL)
# 配置滚动关联
scrollbar.config(command=self.text_widget.yview)
self.text_widget.config(yscrollcommand=scrollbar.set)
# 布局
self.text_widget.pack(side=tk.LEFT, fill=tk.BOTH, expand=True)
scrollbar.pack(side=tk.RIGHT, fill=tk.Y)
# 添加示例内容
self.add_sample_content()
def add_sample_content(self):
"""添加大量文本内容用于测试滚动"""
content = []
for i in range(50):
content.append(f"这是第{i+1}行内容,用于测试滚动条功能。" * 3)
self.text_widget.insert(tk.END, "\n".join(content))
def run(self):
self.root.mainloop()
# 使用示例
if __name__ == "__main__":
app = BasicScrollExample()
app.run()
在Python桌面应用开发中,列表控件是用户界面设计的重要组成部分。无论是文件管理器的文件列表、音乐播放器的播放列表,还是系统配置界面的选项列表,Listbox控件都扮演着关键角色。
对于Windows下的Python开发者来说,掌握Tkinter的Listbox控件不仅能提升应用的用户体验,更是构建专业上位机软件的必备技能。本文将从实际项目需求出发,详细解析Listbox的应用技巧,帮助你快速掌握这个强大的列表控件,让你的Python应用更加专业和实用。
🔍 问题分析:为什么选择Listbox?
在实际的Python开发项目中,我们经常遇到需要展示多个选项供用户选择的场景:
常见应用场景:
- 数据管理系统:显示数据库记录列表
- 文件处理工具:展示待处理文件清单
- 配置管理界面:显示可选配置项
- 日志查看器:展示系统日志条目
传统的按钮或标签控件在处理大量数据时显得力不从心,而Listbox控件能够:
- 高效展示:支持数百甚至数千条记录
- 交互友好:支持单选、多选操作
- 滚动支持:自动处理超出显示区域的内容
- 事件响应:灵活的选择事件处理
💡 解决方案:Listbox核心特性解析
🎯 基础属性配置
Listbox控件的核心属性决定了其外观和行为:
Pythonlistbox = tk.Listbox(
parent, # 父容器
selectmode=tk.SINGLE, # 选择模式:SINGLE/MULTIPLE/EXTENDED
height=10, # 显示行数
width=30, # 显示宽度
font=('Arial', 12), # 字体设置
bg='white', # 背景色
fg='black', # 前景色
selectbackground='blue' # 选中背景色
)
🔧 选择模式详解
不同选择模式的应用场景:
- SINGLE:单选模式,适用于配置选择
- MULTIPLE:多选模式,适用于批量操作
- EXTENDED:扩展选择,支持Shift和Ctrl键